Jiangmiao PangHi! I am a Research Scientist at Shanghai AI Laboratory and head the Embodied AI Center. We go with Intern Robotics. Our mission is to develop Embodied AGI systems and build inclusive infrastructure for the community. We hope to solve real-world challenges, transforming cutting-edge research into practical, scalable solutions. If you share our vision, please do not hesitate to contact me! We have positions for researchers, engineers, interns (>6 months), and joint-training PhD students, with directions spanning humanoids, perception, interaction, manipulation, navigation, physical simulation, and 4D AIGC.
Some previous open-source efforts:
MMDetection
Email / GitHub / Google Scholar / Twitter / Zhihu |
|


News
|
Selected Publications--> For the full publication list, please refer to my Google Scholar.
|

|
Infinite Mobility: Scalable High-Fidelity Synthesis of Articulated Objects via Procedural GenerationXinyu Lian, Zichao Yu, Ruiming Liang, Yitong Wang, Li Ray Luo, Kaixu Chen, Yuanzhen Zhou, Qihong Tang, Xudong Xu, Zhaoyang Lyu, Bo Dai, Jiangmiao Pang In Submission, 2025 project page / arXiv |
|
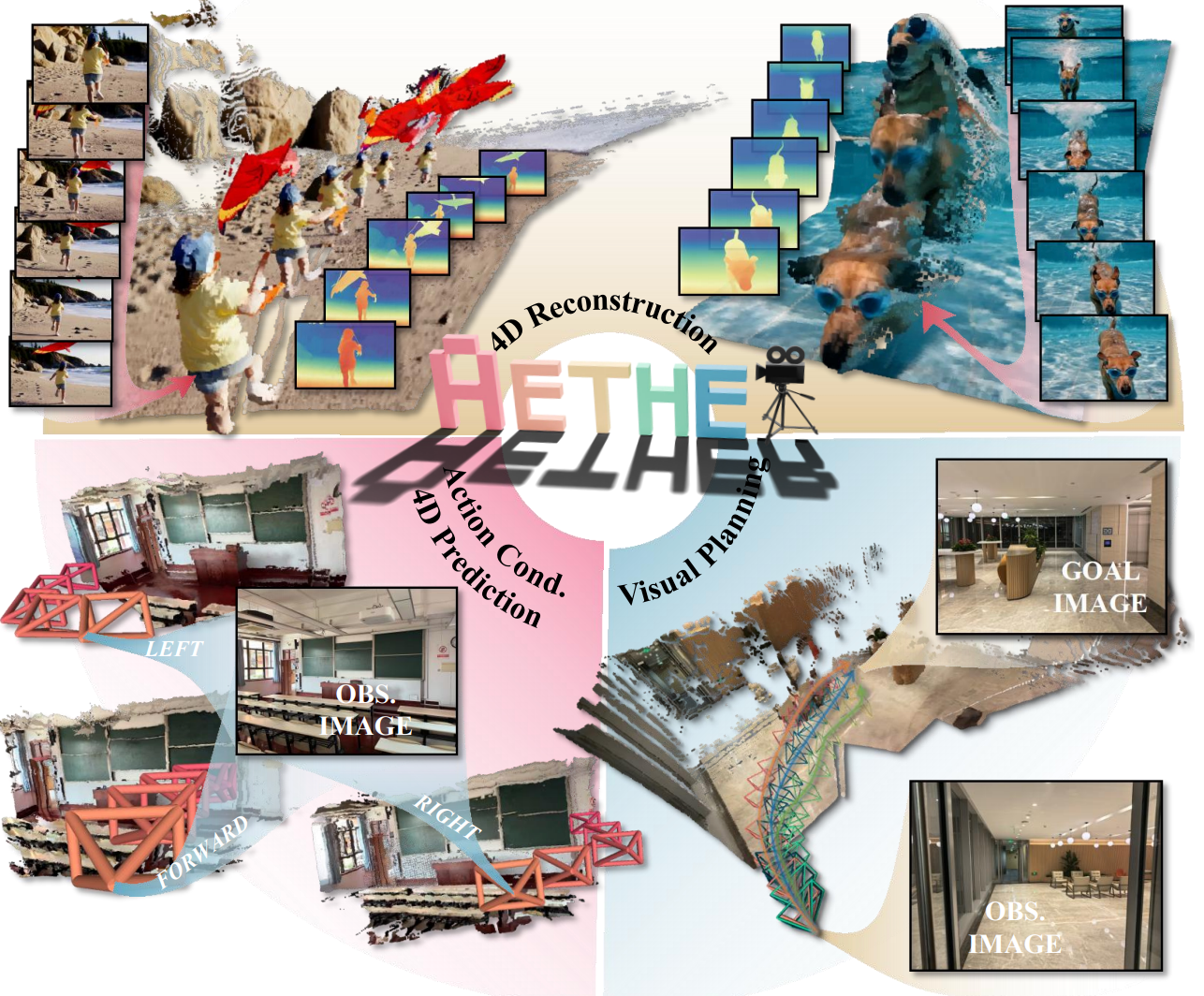
Aether: Geometric-Aware Unified World ModelingAether Team, Haoyi Zhu, Yifan Wang, Jianjun Zhou, Wenzheng Chang, Yang Zhou, Zizun Li, Junyi Chen, Chunhua Shen, Jiangmiao Pang, Tong He In Submission, 2025 project page / arXiv |
|
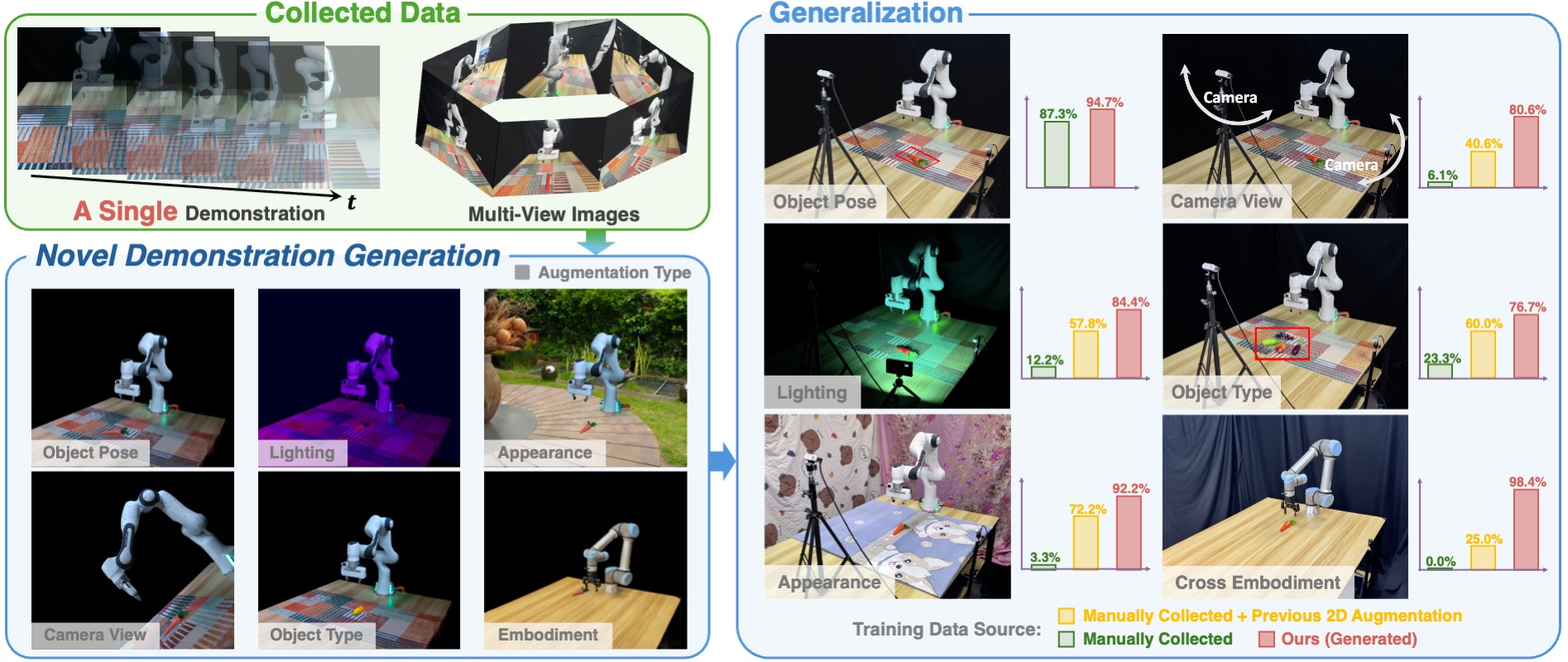
Novel Demonstration Generation with Gaussian Splatting Enables Robust One-Shot ManipulationSizhe Yang*, Wenye Yu*, Jia Zeng, Jun Lv, Kerui Ren, Cewu Lu, Dahua Lin Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
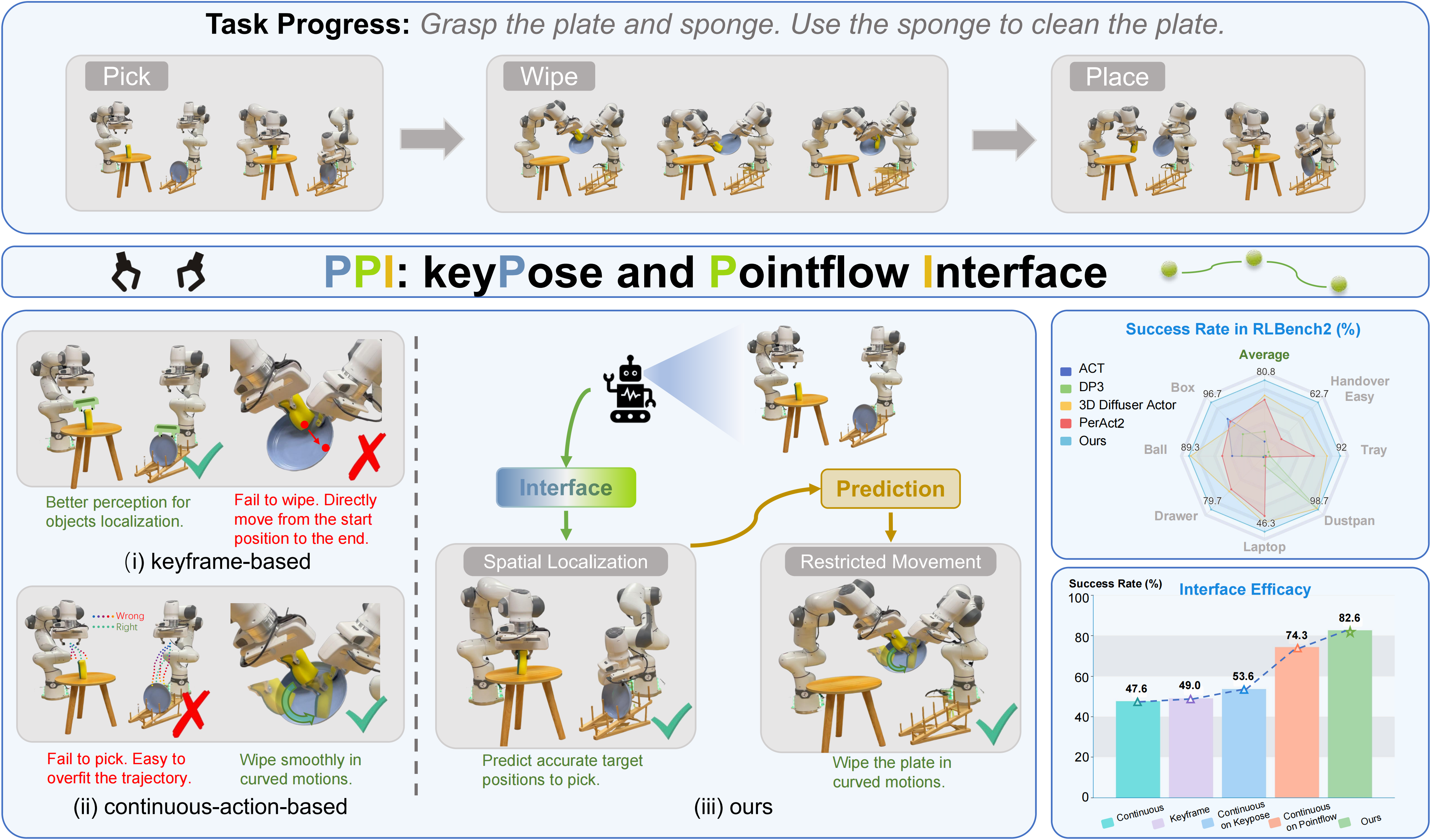
Gripper Keypose and Object Pointflow as Interfaces for Bimanual Robotic ManipulationYuyin Yang*, Zetao Cai*, Yang Tian, Jia Zeng, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
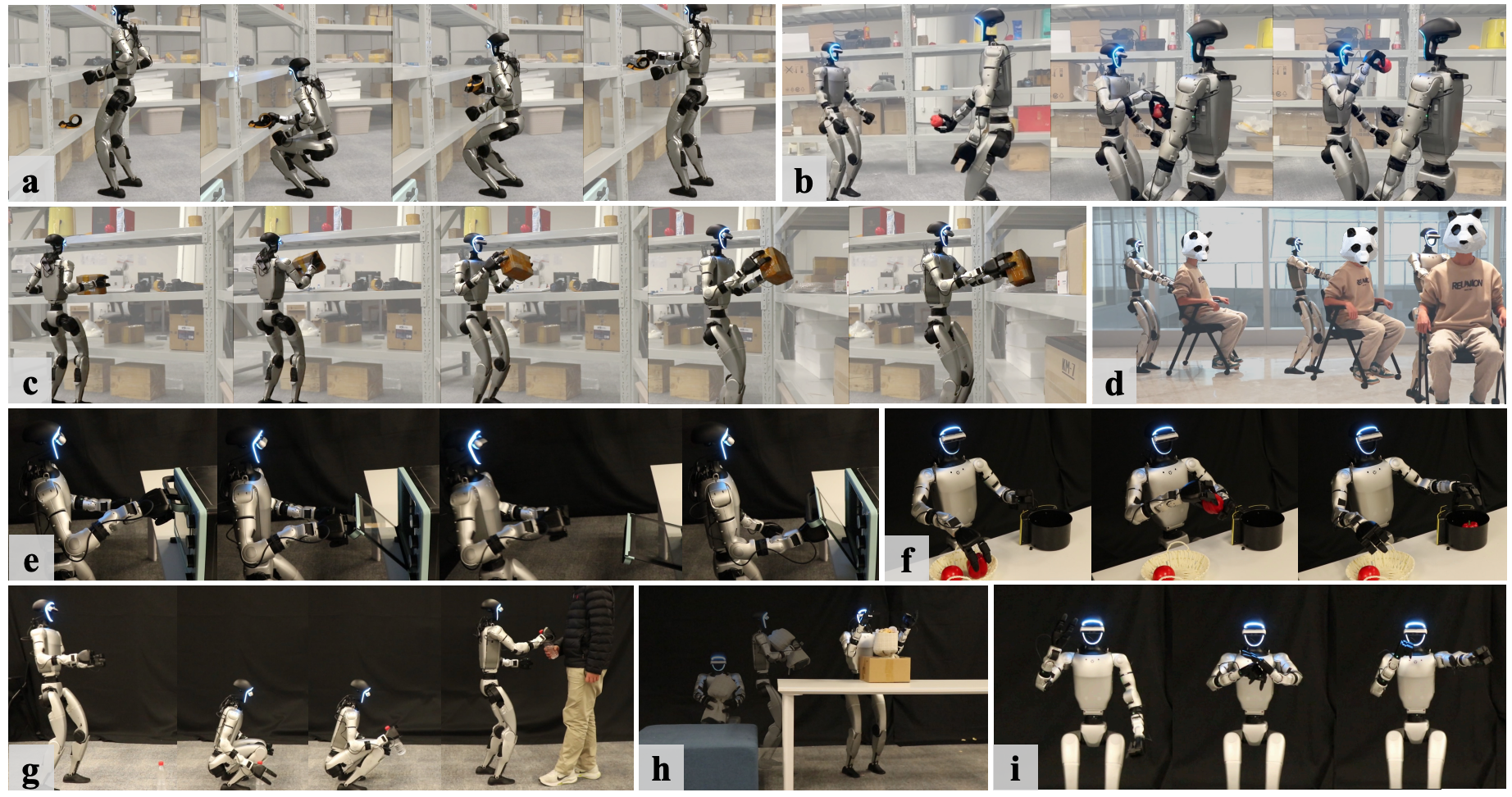
HOMIE: Humanoid Loco-Manipulation with Isomorphic Exoskeleton CockpitQingwei Ben*, Feiyu Jia*, Jia Zeng, Junting Dong, Dahua Lin, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
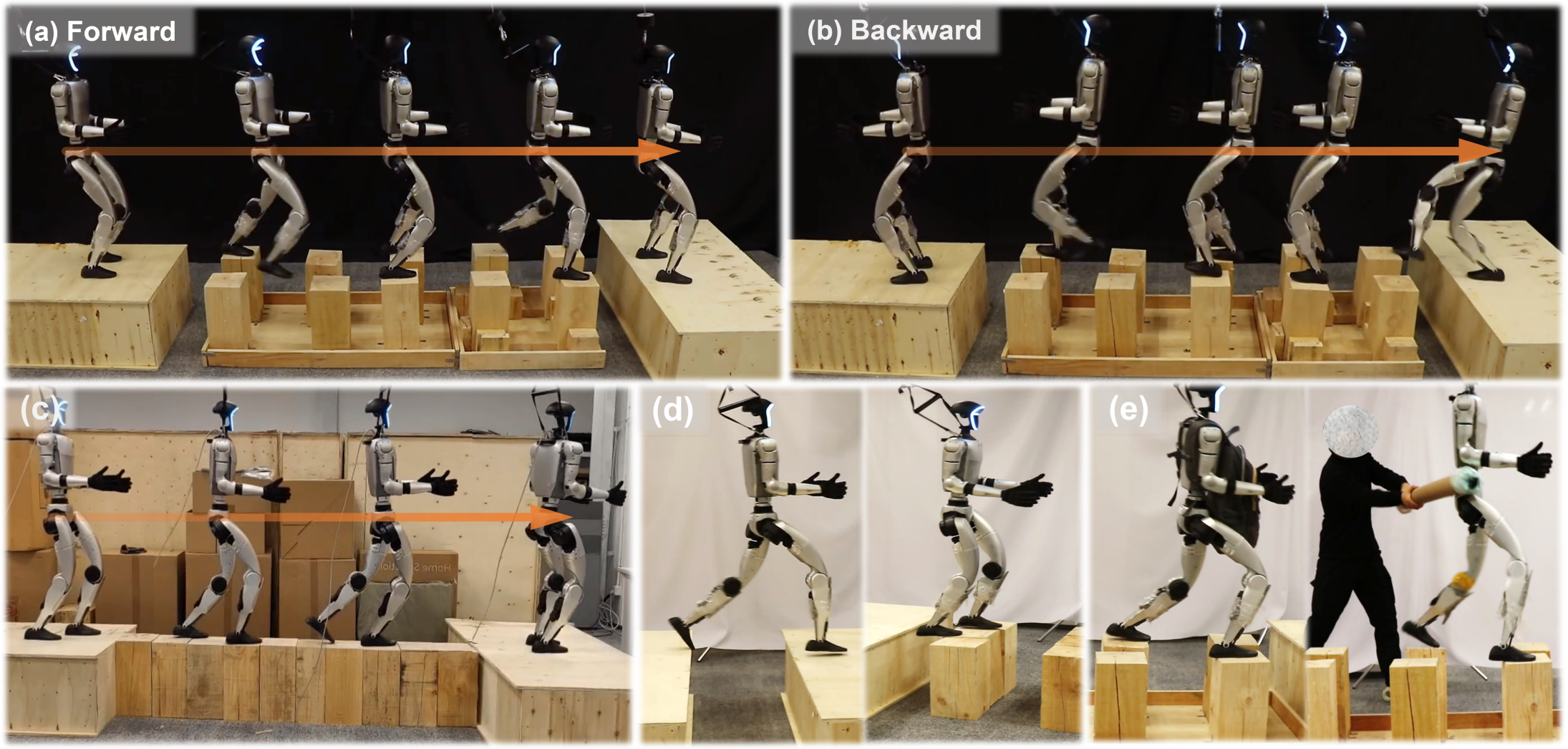
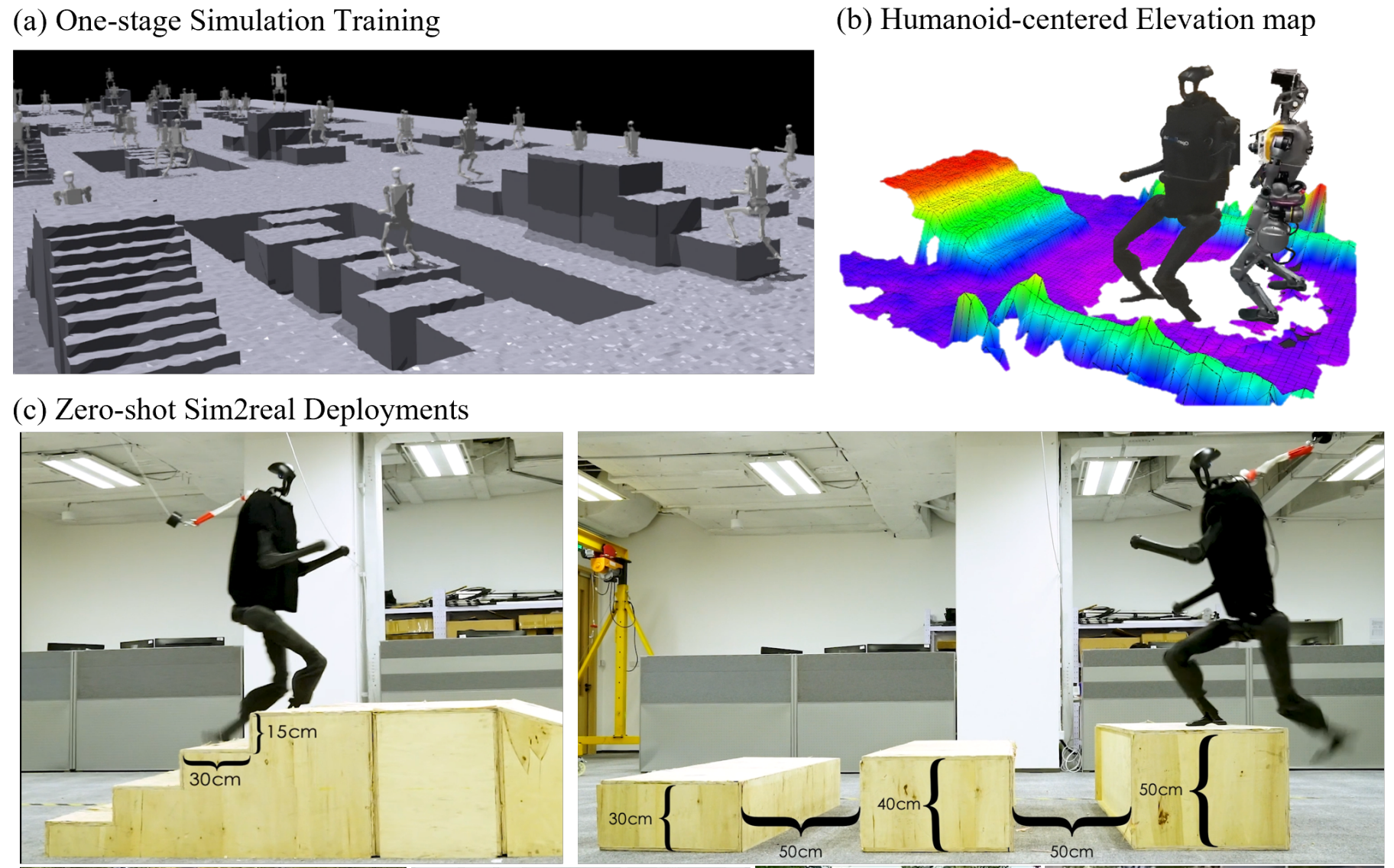
BeamDojo: Learning Agile Humanoid Locomotion on Sparse FootholdsHuayi Wang, Zirui Wang, Junli Ren, Qingwei Ben, Tao Huang, Weinan Zhang, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
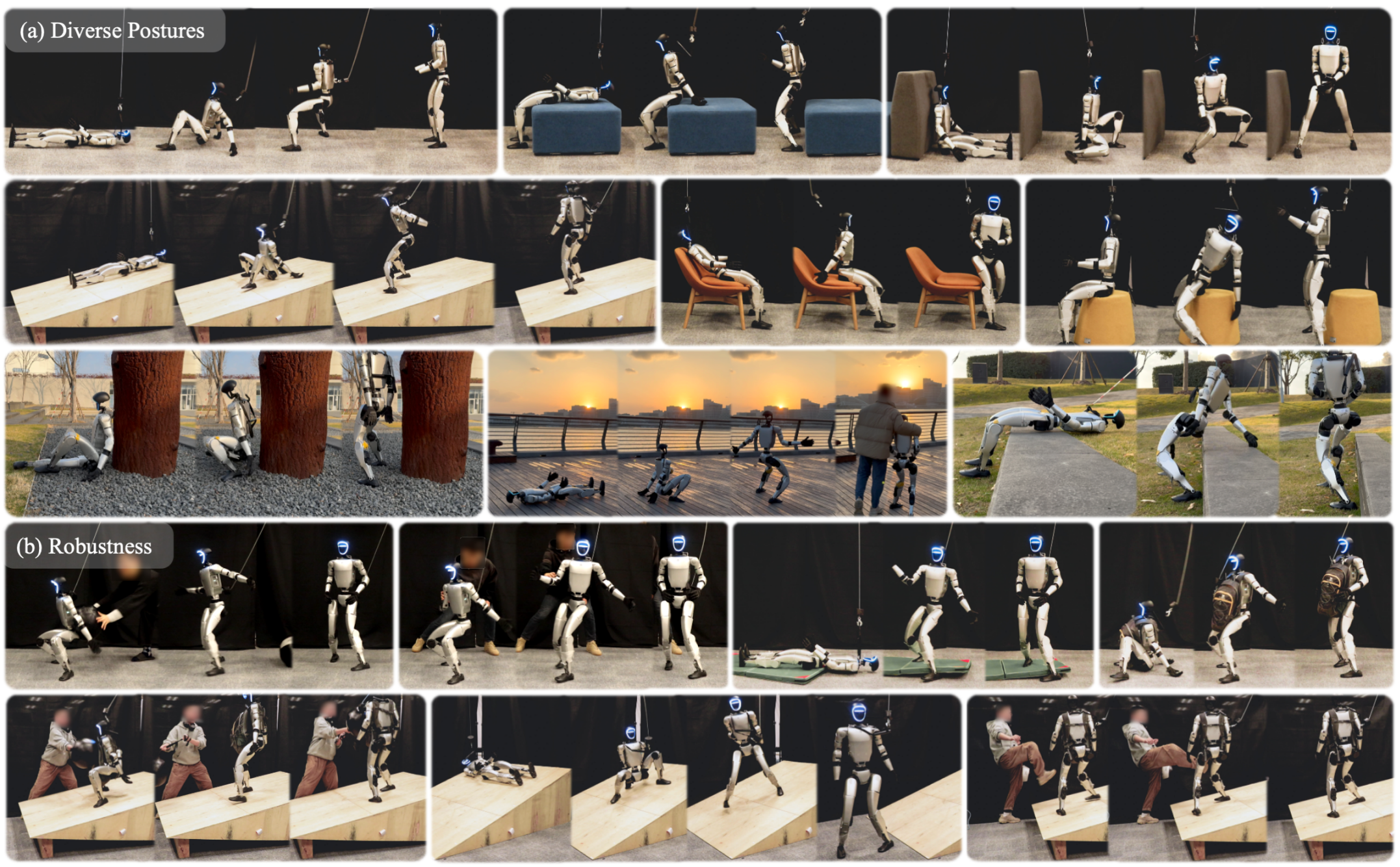
Learning Humanoid Standing-up Control across Diverse PosturesTao Huang, Junli Ren, Huayi Wang, Zirui Wang, Qingwei Ben, Muning Wen, Xiao Chen, Jianan Li, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
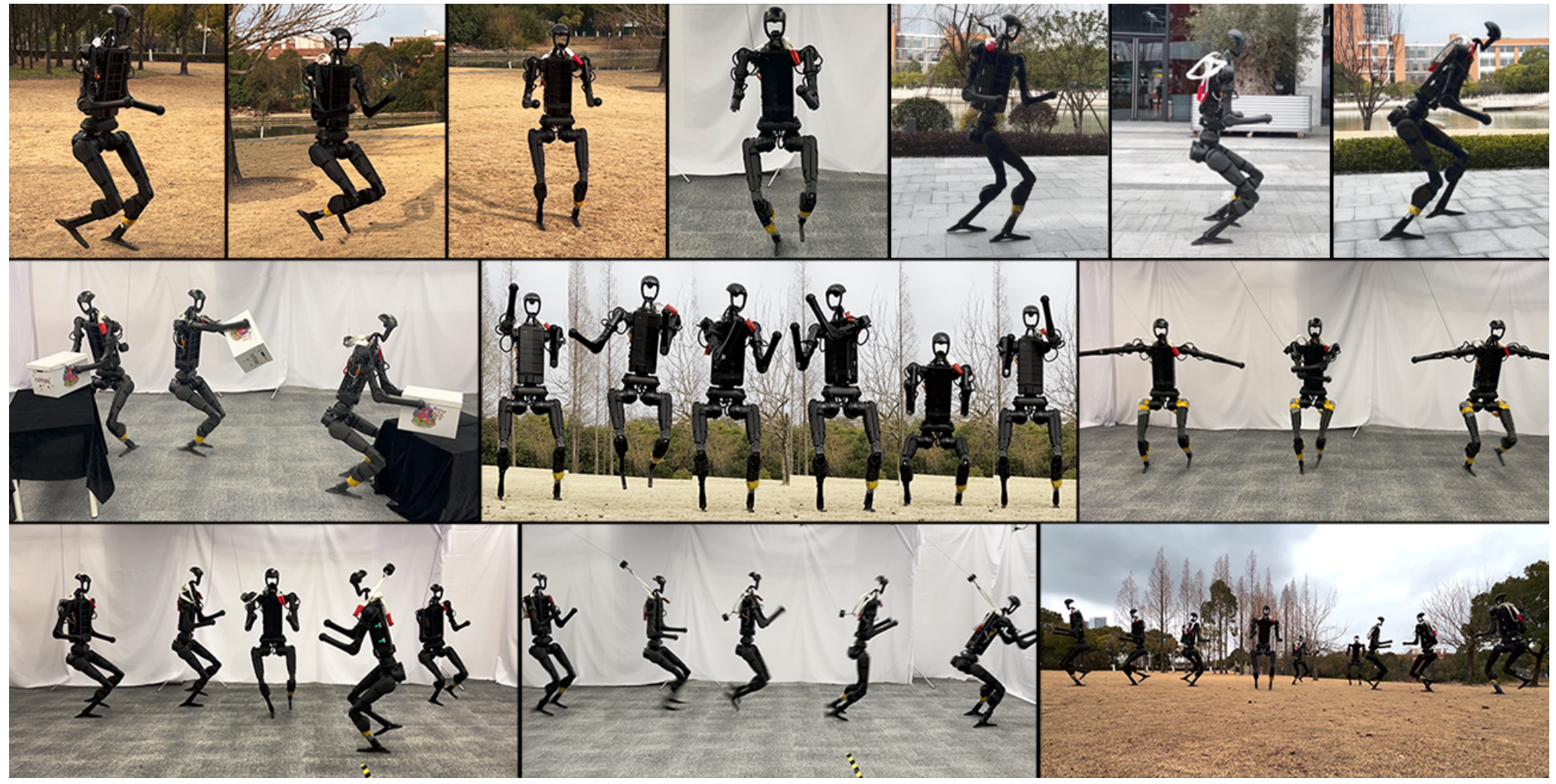
HugWBC: A Unified and General Humanoid Whole-Body Controller for Fine-Grained LocomotionYufei Xue*, Wentao Dong*, Minghuan Liu, Weinan Zhang, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
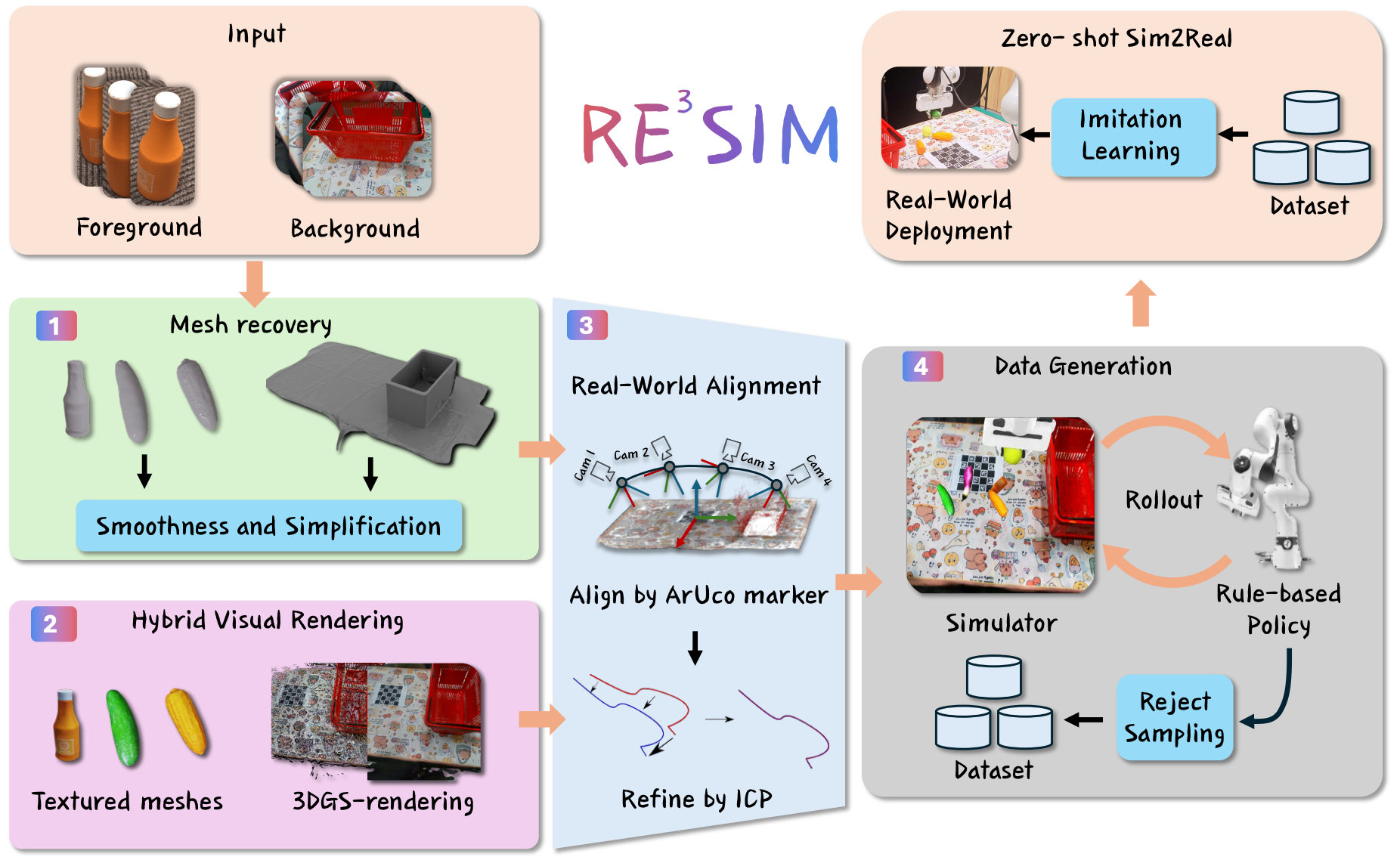
Re3Sim: Generating High-Fidelity Simulation Data via 3D-Photorealistic Real-to-Sim for Robotic ManipulationXiaoshen Han, Minghuan Liu, Yilun Chen, Junqiu Yu, Xiaoyang Lyu, Yang Tian, Bolun Wang, Weinan Zhang, Jiangmiao Pang In Submission, 2025 project page / arXiv |
|
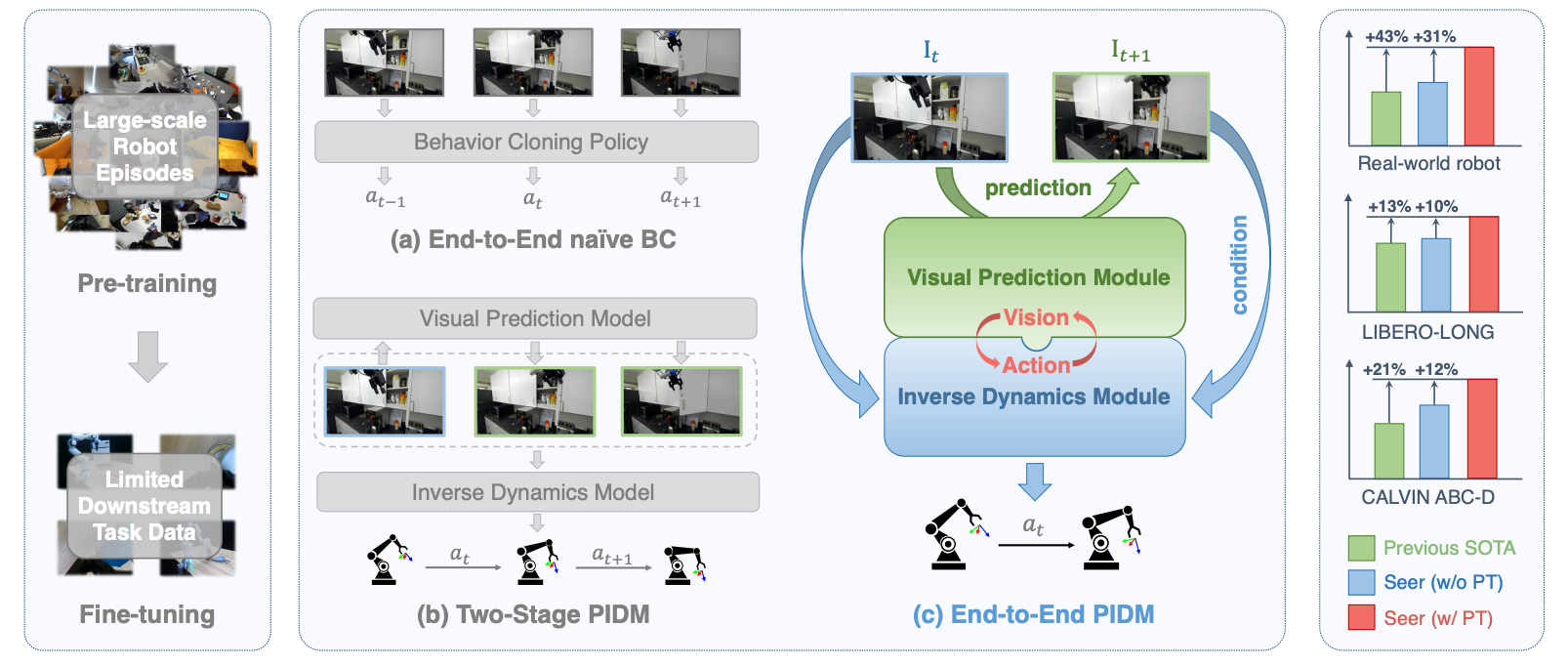
Predictive Inverse Dynamics Models are Scalable Learners for Robotic ManipulationYang Tian*, Sizhe Yang*, Jia Zeng, Ping Wang, Dahua Lin, Hao Dong, Jiangmiao Pang International Conference on Learning Representations (ICLR), 2025 Oral Presentation project page / arXiv |
|
Learning Humanoid Locomotion with Perceptive Internal ModelJunfeng Long*, Junli Ren*, Moji Shi*, Zirui Wang, Tao Huang, Ping Luo, Jiangmiao Pang International Conference on Robotics and Automation (ICRA), 2025 project page / arXiv |
|
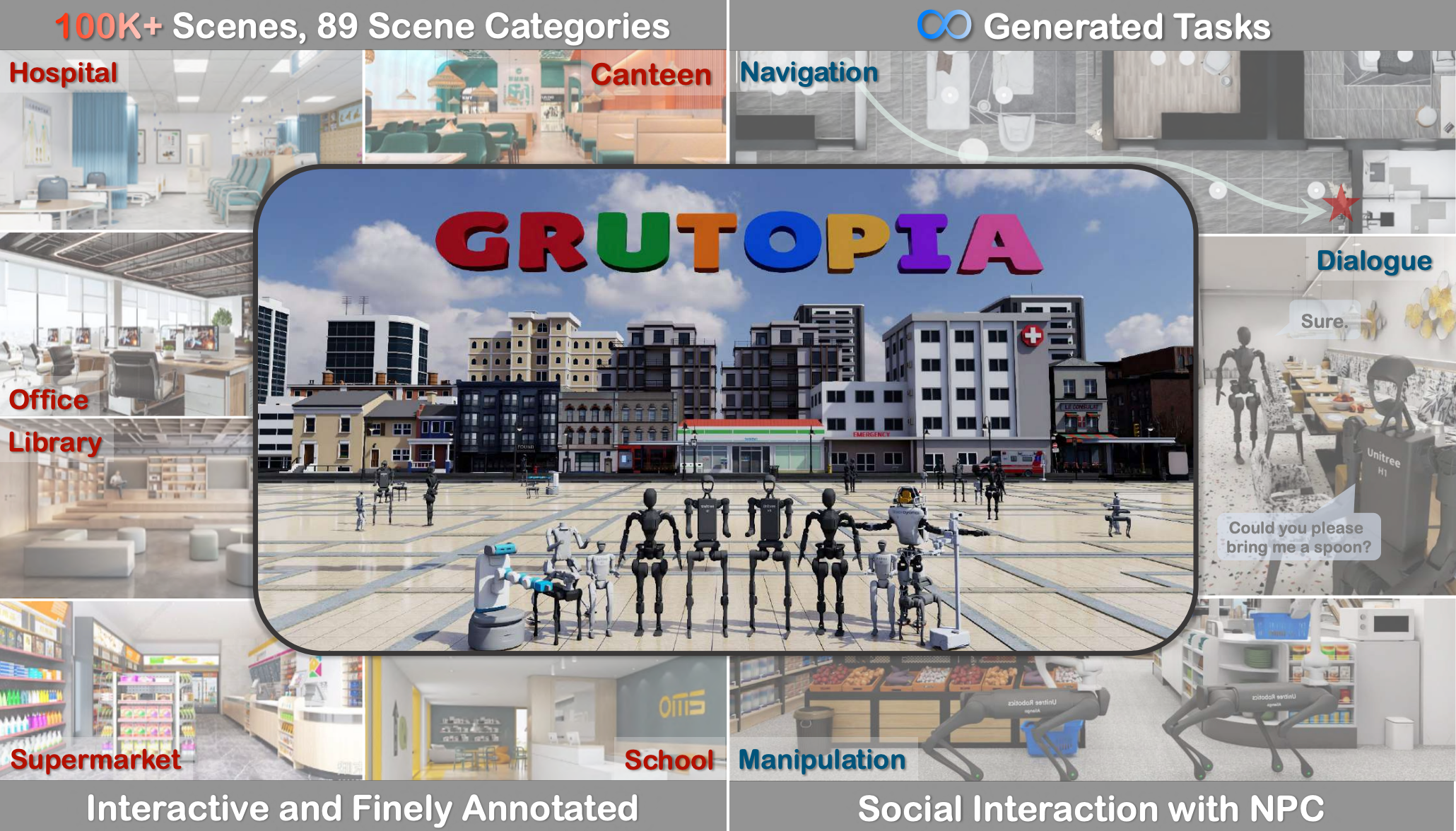
GRUtopia: Dream General Robots in a City at ScaleHanqing Wang*, Jiahe Chen*, Wensi Huang*, Qingwei Ben*, Tai Wang*, Boyu Mi*, Tao Huang, Siheng Zhao, Yilun Chen, Sizhe Yang, Peizhou Cao, Wenye Yu, Zichao Ye, Jialun Li, Junfeng Long, Zirui Wang, Huiling Wang, Ying Zhao, Zhongying Tu, Yu Qiao, Dahua Lin, Jiangmiao Pang In Submission, 2024 project page / arXiv / code |

|
Learning H-Infinity Locomotion ControlJunfeng Long*, Wenye Yu*, Quanyi Li, Zirui Wang, Dahua Lin, Jiangmiao Pang Conference on Robot Learning (CoRL), 2024 project page / arXiv / code |

|
CooHOI: Learning Cooperative Human-Object Interaction with Manipulated Object DynamicsJiawei Gao*, Ziqin Wang*, Zeqi Xiao, Jingbo Wang, Tai Wang, Jinkun Cao, Xiaolin Hu, Si Liu, Jifeng Dai, Jiangmiao Pang Neural Information Processing Systems (NeurIPS), 2024 arXiv / code |
|
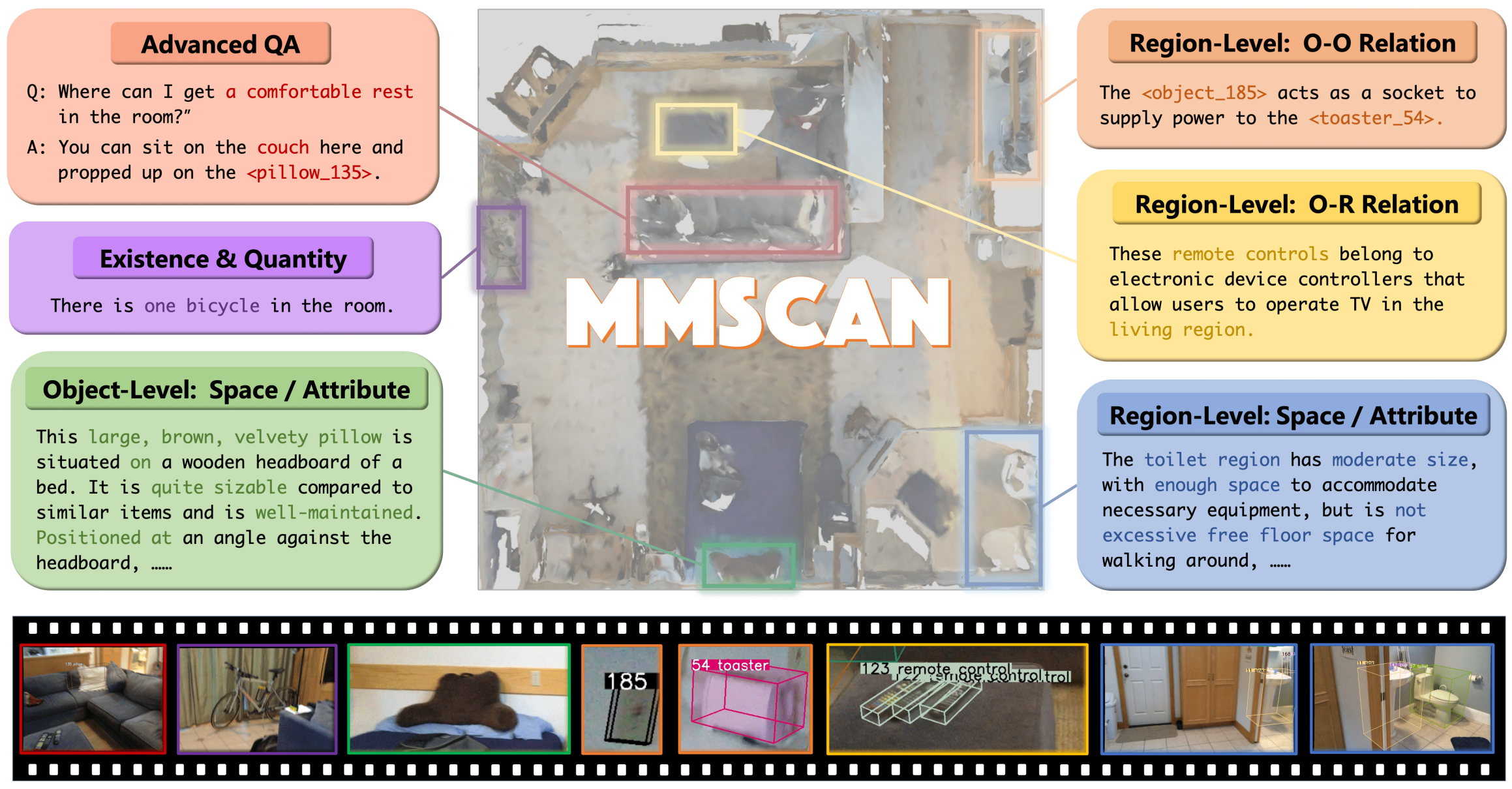
MMScan: A Multi-Modal 3D Scene Dataset with Hierarchical Grounded Language AnnotationsRuiyuan Lyu*, Tai Wang*, Jingli Lin*, Shuai Yang*, Xiaohan Mao, Yilun Chen, Runsen Xu, Haifeng Huang, Chenming Zhu, Dahua Lin, Jiangmiao Pang Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2024 project page / arXiv / code |

|
PointLLM: Empowering Large Language Models to Understand Point CloudsRunsen Xu, Xiaolong Wang, Tai Wang, Yilun Chen, Jiangmiao Pang†, Dahua Lin European Conference on Computer Vision (ECCV), 2024, 2024 Best Paper Candidate project page / arXiv / code |
|
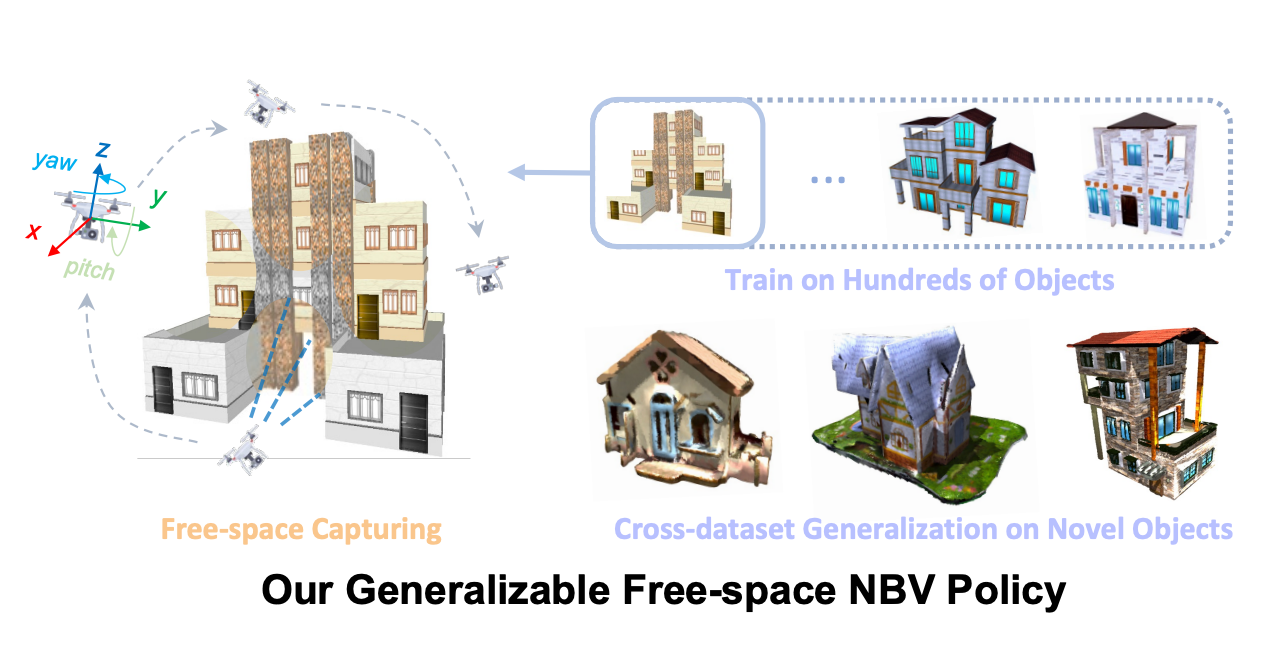
GenNBV: Generalizable Next-Best-View Policy for Active 3D ReconstructionXiao Chen, Quanyi Li, Tai Wang, Tianfan Xue, Jiangmiao Pang Computer Vision and Pattern Recognition (CVPR), 2024 project page / arXiv |
|
EmbodiedScan: A Holistic Multi-Modal 3D Perception Suite Towards Embodied AITai Wang*, Xiaohan Mao*, Chenming Zhu*, Runsen Xu, Ruiyuan Lyu, Peisen Li, Xiao Chen, Wenwei Zhang, Kai Chen, Tianfan Xue, Xihui Liu, Cewu Lu, Dahua Lin, Jiangmiao Pang Computer Vision and Pattern Recognition (CVPR), 2024 project page / arXiv / code |
|
Hybrid Internal Model: Learning Agile Legged Locomotion with Simulated Robot ResponseJunfeng Long*, Zirui Wang*, Quanyi Li, Jiawei Gao, Liu Cao, Jiangmiao Pang International Conference on Learning Representations (ICLR), 2024 project page / arXiv / code |

|
Unified Human-Scene Interaction via Prompted Chain-of-ContactsZeqi Xiao, Tai Wang, Jingbo Wang, Jinkun Cao, Wenwei Zhang, Bo Dai, Dahua Lin, Jiangmiao Pang International Conference on Learning Representations (ICLR), 2024 Spotlight Presentation project page / arXiv / code |
|
|
HOMIE: Humanoid Loco-Manipulation with Isomorphic Exoskeleton CockpitQingwei Ben*, Feiyu Jia*, Jia Zeng, Junting Dong, Dahua Lin, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
|
GRUtopia: Dream General Robots in a City at ScaleHanqing Wang*, Jiahe Chen*, Wensi Huang*, Qingwei Ben*, Tai Wang*, Boyu Mi*, Tao Huang, Siheng Zhao, Yilun Chen, Sizhe Yang, Peizhou Cao, Wenye Yu, Zichao Ye, Jialun Li, Junfeng Long, Zirui Wang, Huiling Wang, Ying Zhao, Zhongying Tu, Yu Qiao, Dahua Lin, Jiangmiao Pang In Submission, 2024 project page / arXiv / code |
|
|
HOMIE: Humanoid Loco-Manipulation with Isomorphic Exoskeleton CockpitQingwei Ben*, Feiyu Jia*, Jia Zeng, Junting Dong, Dahua Lin, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
|
BeamDojo: Learning Agile Humanoid Locomotion on Sparse FootholdsHuayi Wang, Zirui Wang, Junli Ren, Qingwei Ben, Tao Huang, Weinan Zhang, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
|
Learning Humanoid Standing-up Control across Diverse PosturesTao Huang, Junli Ren, Huayi Wang, Zirui Wang, Qingwei Ben, Muning Wen, Xiao Chen, Jianan Li, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
|
HugWBC: A Unified and General Humanoid Whole-Body Controller for Fine-Grained LocomotionYufei Xue*, Wentao Dong*, Minghuan Liu, Weinan Zhang, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
|
Learning Humanoid Locomotion with Perceptive Internal ModelJunfeng Long*, Junli Ren*, Moji Shi*, Zirui Wang, Tao Huang, Ping Luo, Jiangmiao Pang International Conference on Robotics and Automation (ICRA), 2025 project page / arXiv |
|
|
Learning H-Infinity Locomotion ControlJunfeng Long*, Wenye Yu*, Quanyi Li, Zirui Wang, Dahua Lin, Jiangmiao Pang Conference on Robot Learning (CoRL), 2024 project page / arXiv / code |
|
|
CooHOI: Learning Cooperative Human-Object Interaction with Manipulated Object DynamicsJiawei Gao*, Ziqin Wang*, Zeqi Xiao, Jingbo Wang, Tai Wang, Jinkun Cao, Xiaolin Hu, Si Liu, Jifeng Dai, Jiangmiao Pang Neural Information Processing Systems (NeurIPS), 2024 arXiv / code |
|
|
Hybrid Internal Model: Learning Agile Legged Locomotion with Simulated Robot ResponseJunfeng Long*, Zirui Wang*, Quanyi Li, Jiawei Gao, Liu Cao, Jiangmiao Pang International Conference on Learning Representations (ICLR), 2024 project page / arXiv / code |
|
|
Unified Human-Scene Interaction via Prompted Chain-of-ContactsZeqi Xiao, Tai Wang, Jingbo Wang, Jinkun Cao, Wenwei Zhang, Bo Dai, Dahua Lin, Jiangmiao Pang International Conference on Learning Representations (ICLR), 2024 Spotlight Presentation project page / arXiv / code |
|
|
Novel Demonstration Generation with Gaussian Splatting Enables Robust One-Shot ManipulationSizhe Yang*, Wenye Yu*, Jia Zeng, Jun Lv, Kerui Ren, Cewu Lu, Dahua Lin Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
|
Gripper Keypose and Object Pointflow as Interfaces for Bimanual Robotic ManipulationYuyin Yang*, Zetao Cai*, Yang Tian, Jia Zeng, Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
|
Re3Sim: Generating High-Fidelity Simulation Data via 3D-Photorealistic Real-to-Sim for Robotic ManipulationXiaoshen Han, Minghuan Liu, Yilun Chen, Junqiu Yu, Xiaoyang Lyu, Yang Tian, Bolun Wang, Weinan Zhang, Jiangmiao Pang In Submission, 2025 project page / arXiv |
|
|
Predictive Inverse Dynamics Models are Scalable Learners for Robotic ManipulationYang Tian*, Sizhe Yang*, Jia Zeng, Ping Wang, Dahua Lin, Hao Dong, Jiangmiao Pang International Conference on Learning Representations (ICLR), 2025 Oral Presentation project page / arXiv |
|
|
Infinite Mobility: Scalable High-Fidelity Synthesis of Articulated Objects via Procedural GenerationXinyu Lian, Zichao Yu, Ruiming Liang, Yitong Wang, Li Ray Luo, Kaixu Chen, Yuanzhen Zhou, Qihong Tang, Xudong Xu, Zhaoyang Lyu, Bo Dai, Jiangmiao Pang In Submission, 2025 project page / arXiv |
|
|
Aether: Geometric-Aware Unified World ModelingAether Team, Haoyi Zhu, Yifan Wang, Jianjun Zhou, Wenzheng Chang, Yang Zhou, Zizun Li, Junyi Chen, Chunhua Shen, Jiangmiao Pang, Tong He In Submission, 2025 project page / arXiv |
|
|
Novel Demonstration Generation with Gaussian Splatting Enables Robust One-Shot ManipulationSizhe Yang*, Wenye Yu*, Jia Zeng, Jun Lv, Kerui Ren, Cewu Lu, Dahua Lin Jiangmiao Pang Robotics: Science and Systems (RSS), 2025 project page / arXiv |
|
|
MMScan: A Multi-Modal 3D Scene Dataset with Hierarchical Grounded Language AnnotationsRuiyuan Lyu*, Tai Wang*, Jingli Lin*, Shuai Yang*, Xiaohan Mao, Yilun Chen, Runsen Xu, Haifeng Huang, Chenming Zhu, Dahua Lin, Jiangmiao Pang Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2024 project page / arXiv / code |
|
|
PointLLM: Empowering Large Language Models to Understand Point CloudsRunsen Xu, Xiaolong Wang, Tai Wang, Yilun Chen, Jiangmiao Pang†, Dahua Lin European Conference on Computer Vision (ECCV), 2024, 2024 Best Paper Candidate project page / arXiv / code |
|
|
GenNBV: Generalizable Next-Best-View Policy for Active 3D ReconstructionXiao Chen, Quanyi Li, Tai Wang, Tianfan Xue, Jiangmiao Pang Computer Vision and Pattern Recognition (CVPR), 2024 project page / arXiv |
|
|
EmbodiedScan: A Holistic Multi-Modal 3D Perception Suite Towards Embodied AITai Wang*, Xiaohan Mao*, Chenming Zhu*, Runsen Xu, Ruiyuan Lyu, Peisen Li, Xiao Chen, Wenwei Zhang, Kai Chen, Tianfan Xue, Xihui Liu, Cewu Lu, Dahua Lin, Jiangmiao Pang Computer Vision and Pattern Recognition (CVPR), 2024 project page / arXiv / code |
Selected Awards
|
|
|